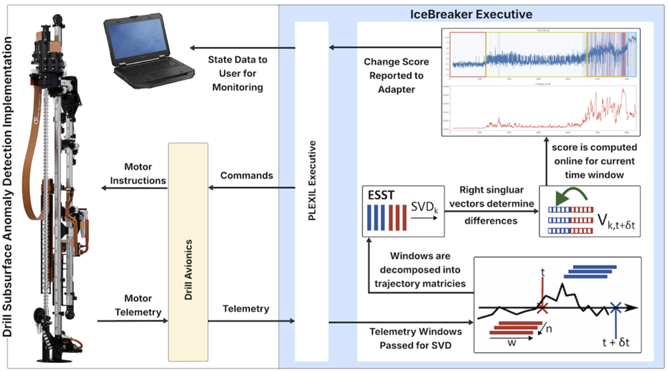
We are pleased to share that a paper co-authored by members of our group (Lucas Weber) has been accepted for presentation at IEEE International Conference on Robotics and Automation 2026 in Vienna. The paper, “Model-Free Subsurface Anomaly Detection using Subspace Analysis Techniques for Sparse Telemetry for Extraterrestrial Drilling Robots”, presents an online, training-free approach to detect drilling faults and subsurface anomalies from sparse telemetry in challenging conditions.
Our contribution focuses on the ESST change-point detection method, which leverages subspace characteristics across time windows to remain robust under the strong noise typical of percussive drilling telemetry. It builds on our previous publication, “Fault Prediction in Planetary Drilling Using Subspace Analysis Techniques”.
The acceptance also underscores that methods from change-point detection—developed at our chair in a project on time-series structuring and integration—can have a broader impact in robotics and autonomy under extreme conditions.
We are pleased that our results transfer across research topics. We congratulate our collaborators at the University of Minnesota and NASA for their successful publication.
 1/4
1/4 2/4
2/4 3/4
3/4 4/4
4/4